智能飞机清洗机器人是一款可清洁窄体和宽体的民航客机的机器人,独创的12.5米机械清洁臂,拥有一个具有六个自由度的清洁刷头,可轻松清洁飞机的80%的面积。同时机身配置了先进的传感装置、液压和控制系统、高精度的定位功能确保能够环保、安全和高效地清洗飞机。友好的人机交互体验使得工人在操作过程中得心应手。
飞机清洗机器人体积庞大,机器内部采用金属框架结构,机器外观采用钣金折弯工艺。既节省开模费用,又实现外观很强的视觉冲击力。
机械臂则采用了铝合金材料结构设计。机械臂的伸展动作通过液压传动和传感器定位来实现。主机机头的旋转动作和清洁刷的旋转动作都是通过电机来驱动。
飞机清洗机器人的机械臂为了能够清洗庞大的飞机,所以伸展幅度需要很大,完全伸展以后机械臂要长达12.5米。根据这个需求,在结构设计中就要考虑机械臂在伸展工作时产生的杠杆效应,避免机器在运行时出现整体倾斜或者倾倒的情况。所以在结构设计时,通过计算得出机械臂伸展到每个角度和距离的重心,根据计算结果可以得出主机所需要的配重。同时,在结构设计过程中,为了降低成本,也为了不让整机重量过重,导致以后运输等造成的困难,所以考虑用铝合金材料来代替原来的钢管材料来做机械臂。这样,机械臂的整体重量降低了,相应的伸展时产生的力也变小了,主机就可以减少配重,使整机能够降低运输等带来的困难。
当然,更换了机械臂的传统材料钢管以后,就会带来一些新的难题。飞机清洗机器人的机械臂是一个三节臂。每一节臂都需要有一定角度的伸展,那就需要在每一节臂上都要安装液压缸来驱动。液压缸在运作时,会产生一定的作用力,如果用传统的钢管材料,其具有一定的强度,可以保证液压缸在运作时不会撕裂或者断裂。但换成了铝合金材料以后,重量虽然减轻了,但强度也有所降低,很容易产生撕裂和断裂。为了解决这个问题,就需要精确计算出液压缸固定位置。这样既能让液压缸运作时使机械臂能打开到需要的角度,又能减小液压缸运作时对节臂产生的作用力。固定好液压缸的位置以后,就需要在液压缸和铝合金材料的机械臂之间,做强度加强结构。以保证液压缸运作时,机械臂不会产生问题。强度加强结构也需要应用在电机与机械臂的连接结构上。如上所述,飞机清洗机器人的清洁刷有六个自由度的旋转。自由度的旋转需要通过电机来驱动。电机的重量和负载产生的作用力也不小,所以在机械臂和电机连接的地方,都需要做强度加强结构。
飞机清洗机器人为了能让视觉有强大的冲击力,主机外观件选用了钣金折弯焊接工艺。用钣金折弯工艺既能还原外观设计师所设计的外观,还能通过钣金烤漆工艺使钣金件看上去更有质感和光泽。因为清洗机器人是在户外工作,容易有磕碰后产生刮伤或者划伤等问题。所以在烤漆工序以后,加喷了一层UV漆,这样钣金件就多了一层保护膜,更好的保护主机的外观面。机械臂采用的是铝合金材料,最初选用了阳极氧化工艺来做表面处理,虽然效果很好,但和主机的颜色、质感有些不协调,所以还需要用烤漆工艺来做。可铝合金的表面经过打磨以后的附着力和钣金材料的不同,容易掉漆。经过研究后,在材料表面上多做了几道加工工序,增加了油漆附着力,解决了容易掉漆的问题。
智能飞机清洗机器人实现了:
1、自动化和高效的清洗方式
2、有效降低清洁工人劳动强度和高空作业的危险性。
3、更环保,更节约成本。
智能飞机清洗机器人
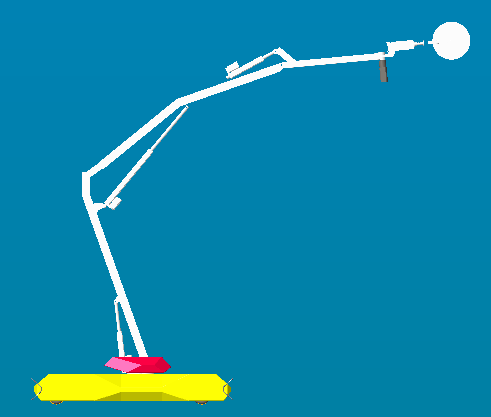
机械臂伸展图
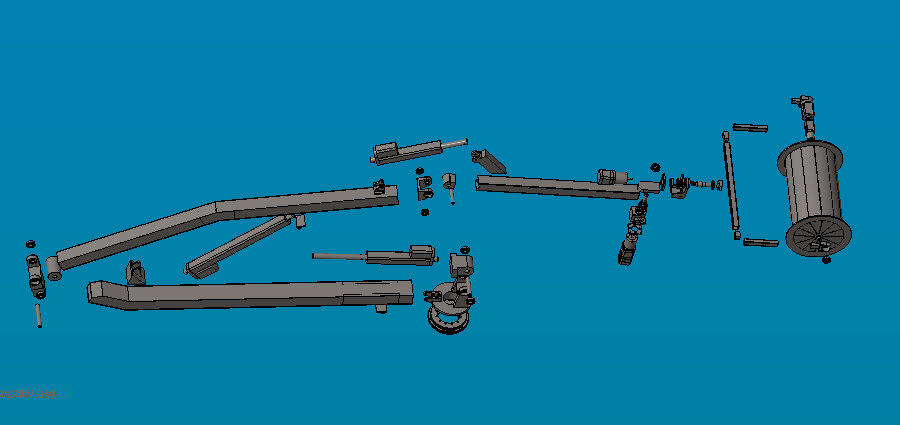
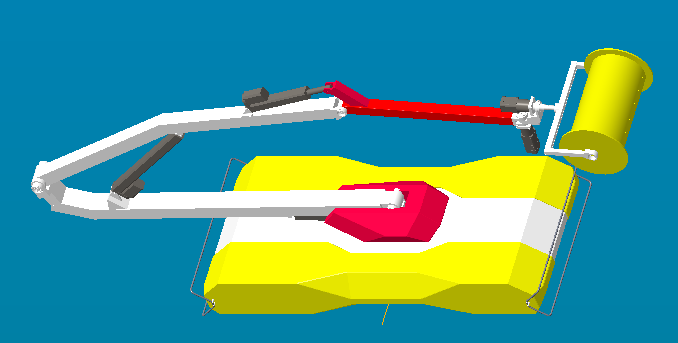
机械臂——爆炸图

爆炸图——主机